Data Preprocessing : Interpolation
마지막으로 UE Trajectory를 수행할 차례이다.
데이터를 살펴보면, Longitude와 Latitude가 일정 주기로 수집되기 때문에, 일정한 Longitude와 Latitude가 유지되다가 다음 주기에 급격하게 바뀌는 양상을 띤다.

이런 식으로 일정한 위도, 경도가 수집되다가 다음 수집 시기에 바뀌는 형태이다.
따라서 LSTM 모델의 학습 및 추론을 위해서 Interpolation이 필요하다.
우선, 같은 값을 가지는 데이터를 특정 Chunk로 묶은 다음, 보강을 진행해야 한다.

이 점들을 찍은 원본 데이터를 살펴보면 아래와 같다.

Interpolation Technique
이후, 각 점과 점 사이를 보강해야 하는데, 가장 기본적인 linear interpolation 방법에서 시작해 다양한 interpolation 방법들이 있다.
1. 선형 보간 (Linear Interpolation)
가장 단순한 방법으로 두 점 사이를 직선으로 연결하는 방법이다.

가장 직관적이고 빠르며, 꼬임이 없지만, 변곡점이 생겨서 부드럽지는 않다.

2. 2차 다항식 보간 (Quadratic Interpolation)
2차 곡선으로 연결하여 부드러움을 확보한 보간 방식이다.
linear보다 시각적으로 자연스럽지만, 점이 불규칙하거나 급격히 변하면 꼬임(overshoot)이 발생할 수 있다.
3. 3차 스플라인 보간 (cubic interpolation)
각 구간을 이번에는 3차 다항식으로 연결한다.
가장 부드러운 연결이고, 곡선이 자연스럽지만, 데이터 경향이 급변할 경우 overshoot가 발생한다.

단순한 2차, 3차 보간 방식은 데이터의 양쪽 끝부분에서 상당한 꼬임현상을 일으킬 수 있다.
4. 추가적인 꼬인 방지 기법들
4-1. pchip (Piecewise Cubic Hermite Interpolating Polynomial)
이는 구간별 3차 에르미트 보간이라는 뜻으로, 3차라서 부드러운 동시에 꼬임을 방지한 방법이다.
데이터 단조성(monotonicity)를 유지하도록 설계되어 값이 갑자기 위로 튀지 않는다.
현실의 연속 데이터에 매우 적합하다. (그렇다고 꼬임이 안일어나는 건 아님!)
4-2. Akima (Akima Spline)
이 역시 pchip과 유사한 방법으로, outlier에 강한 3차 스플라인이다.
이웃 데이터의 기울기 변화를 반영하여 더 자연스러운 형태로 연결한다.
이로 인해 급격한 변화(예: 커브, 신호 전이 구간)에서도 안정적이다.
계산량은 약간 더 많지만 비선형 시계열 데이터에 매우 좋음

여러 Trajectory에 적용해본 결과 Linear Interpolation이 가장 적합하다고 결론을 내렸다.
(PCHIP이나 AKIMA가 부드럽긴 하지만, 둘 중 하나에서 반드시 꼬임 현상이 발생하는 것을 확인)
그리고 해당 데이터는 차를 타고 10분 정도를 이동하면서 수집한 데이터들인데, 따지고 보면 도로는 직선 구간이 많으니까..!
Trajectory Prediction을 위한 Feature Selection
이번에는 예측해야 하는 값이 총 2개 (Longitude와 Latitude)이므로, 이 둘에 대한 Correlation을 확인하였다.
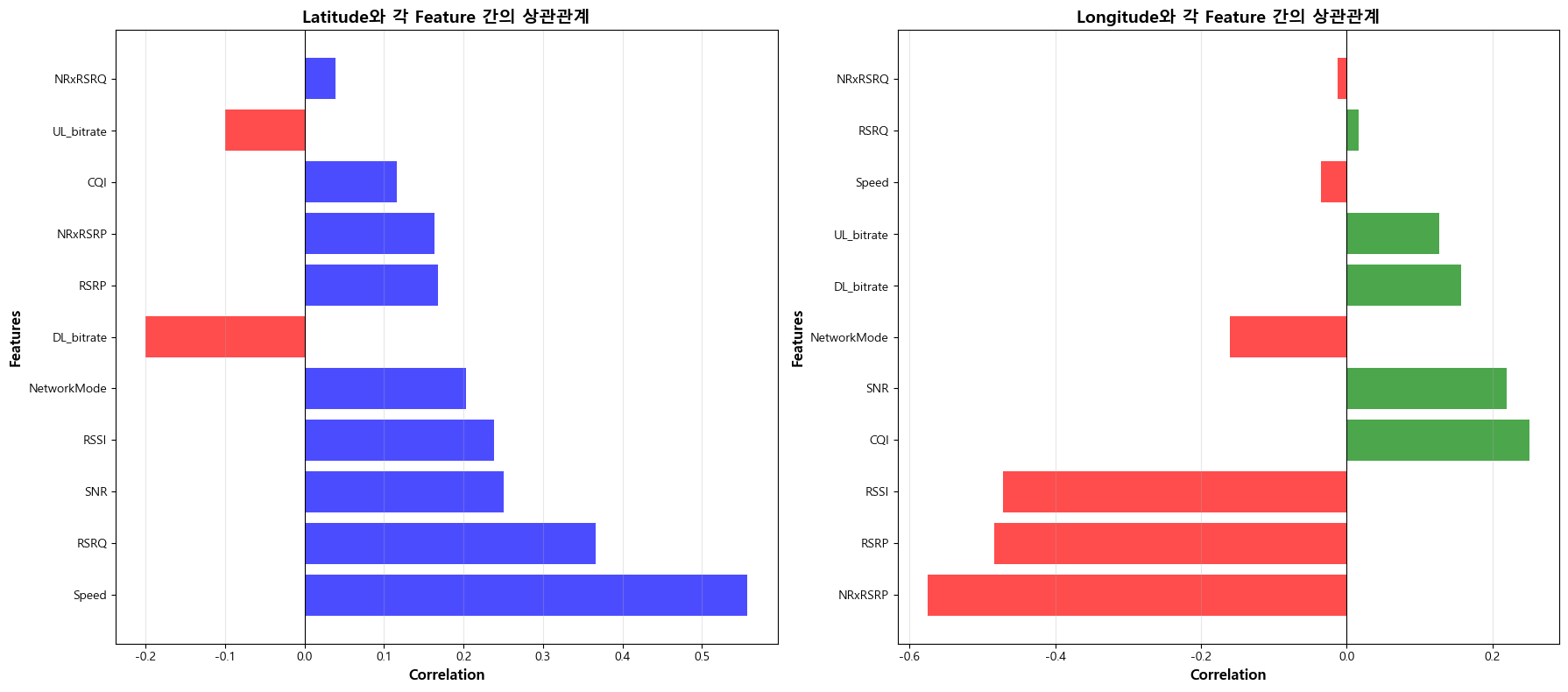
횡으로 이동하는 데이터가 많았는지, Latitude와 Speed가 큰 상관관계를 보였다.
그 외에도 Latitude는 RSRQ와 높은 상관관계를 보였고, Longitude는 NRxRSRP, RSRP, RSSI와 강한 음의 상관관계를 보였다.
그 다음으로 Random Forest Feature Importance를 계산한 결과는 아래와 같다.
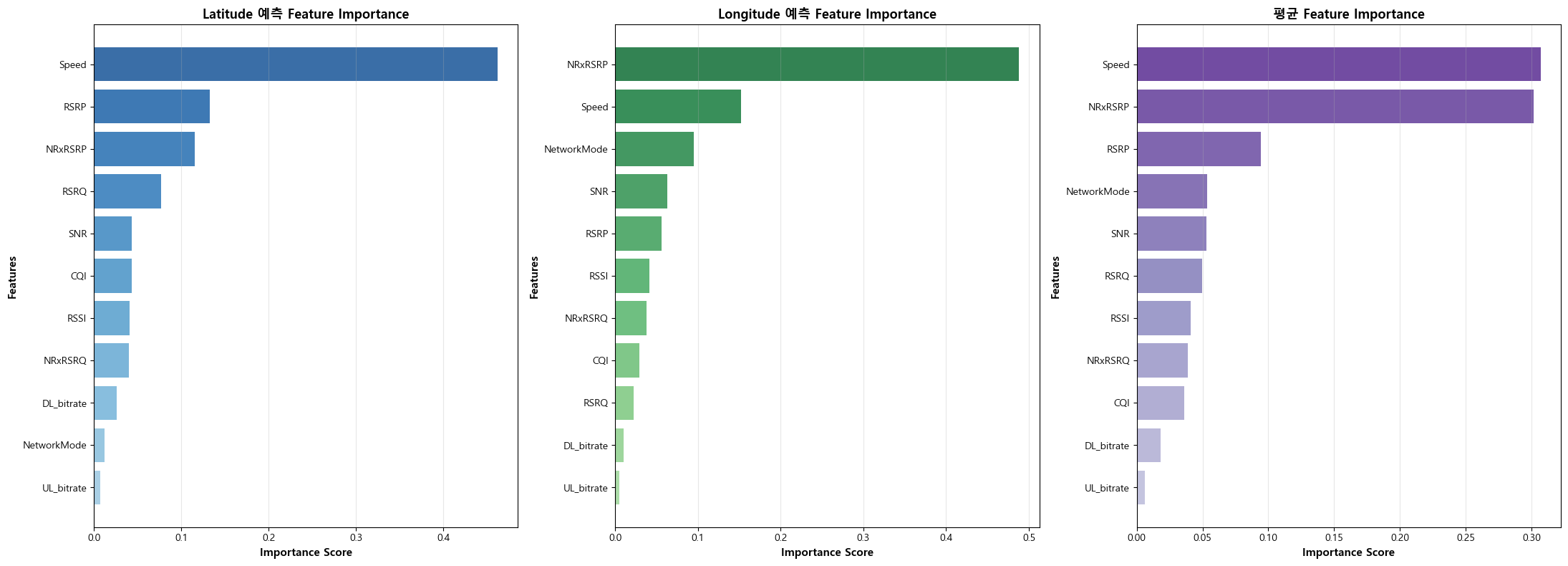
Speed와 NRxRSRP가 가장 중요도가 높았고, 그 다음으로 RSRP, NetworkMode(이건 좀 의외)가 뒤를 이었다.
종합적으로 고려한 결과, Longitude와 Latitude를 예측하기 위해 Speed, RSRP, NRxRSRP를 활용하는 것으로 결론을 내렸다.
UE Trajectory 예측을 위한 LSTM & LLM 모델 비교
1. Seen-LSTM

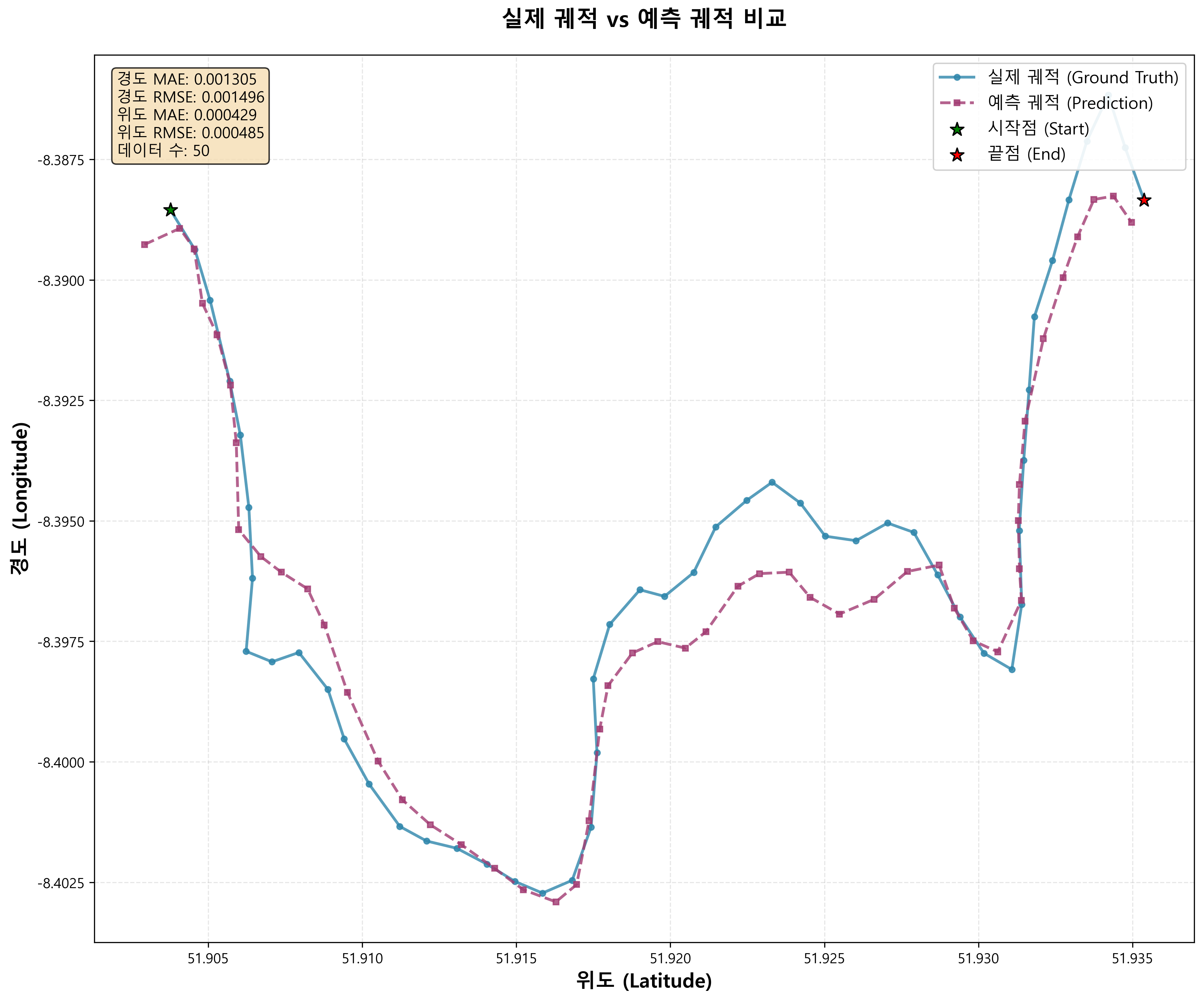
워낙 위도와 경도 데이터가 작아서 MAE와 RMSE 값이 상당히 작게 나왔다.
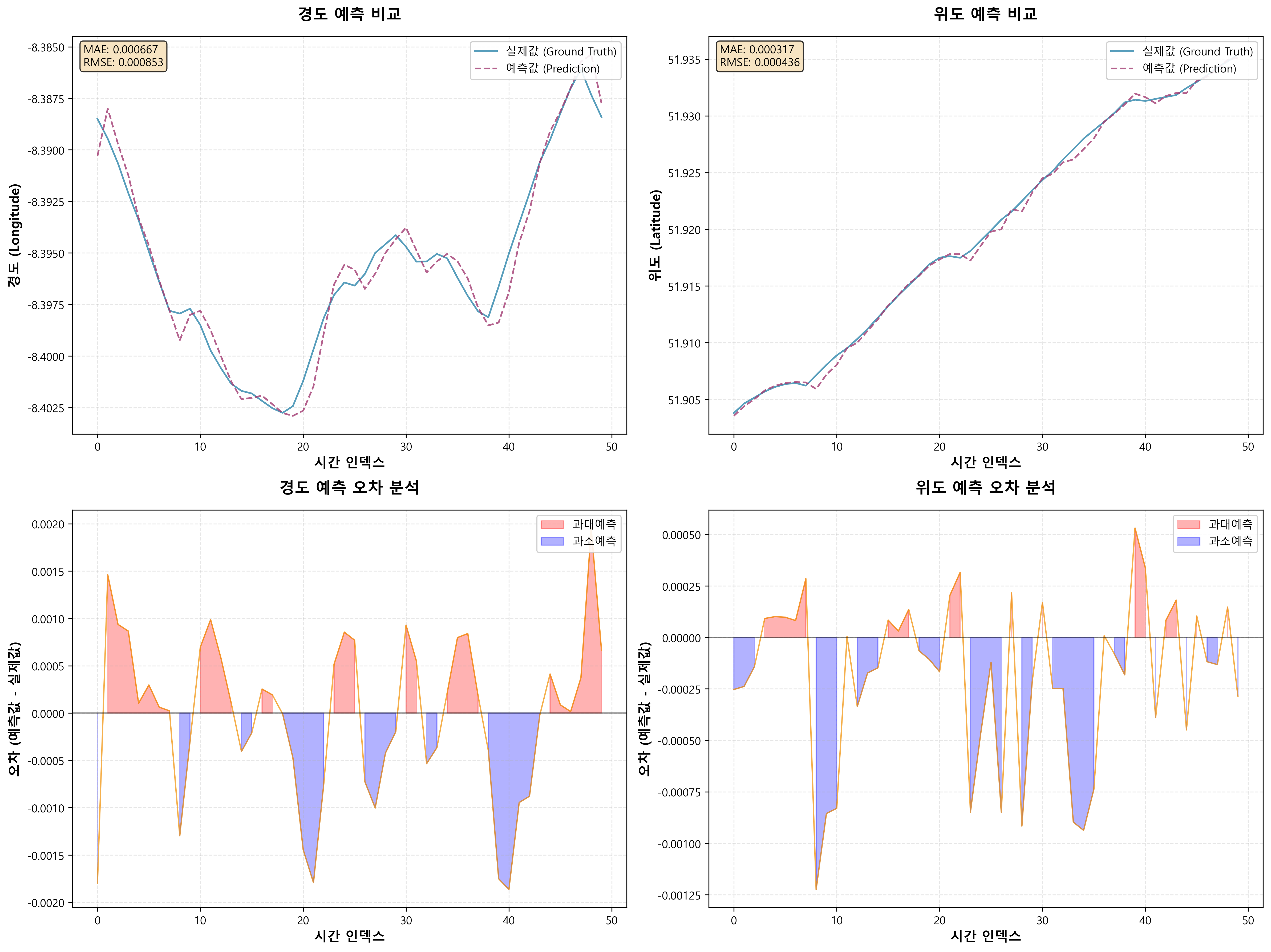
2. LLM

3. Unseen-LSTM
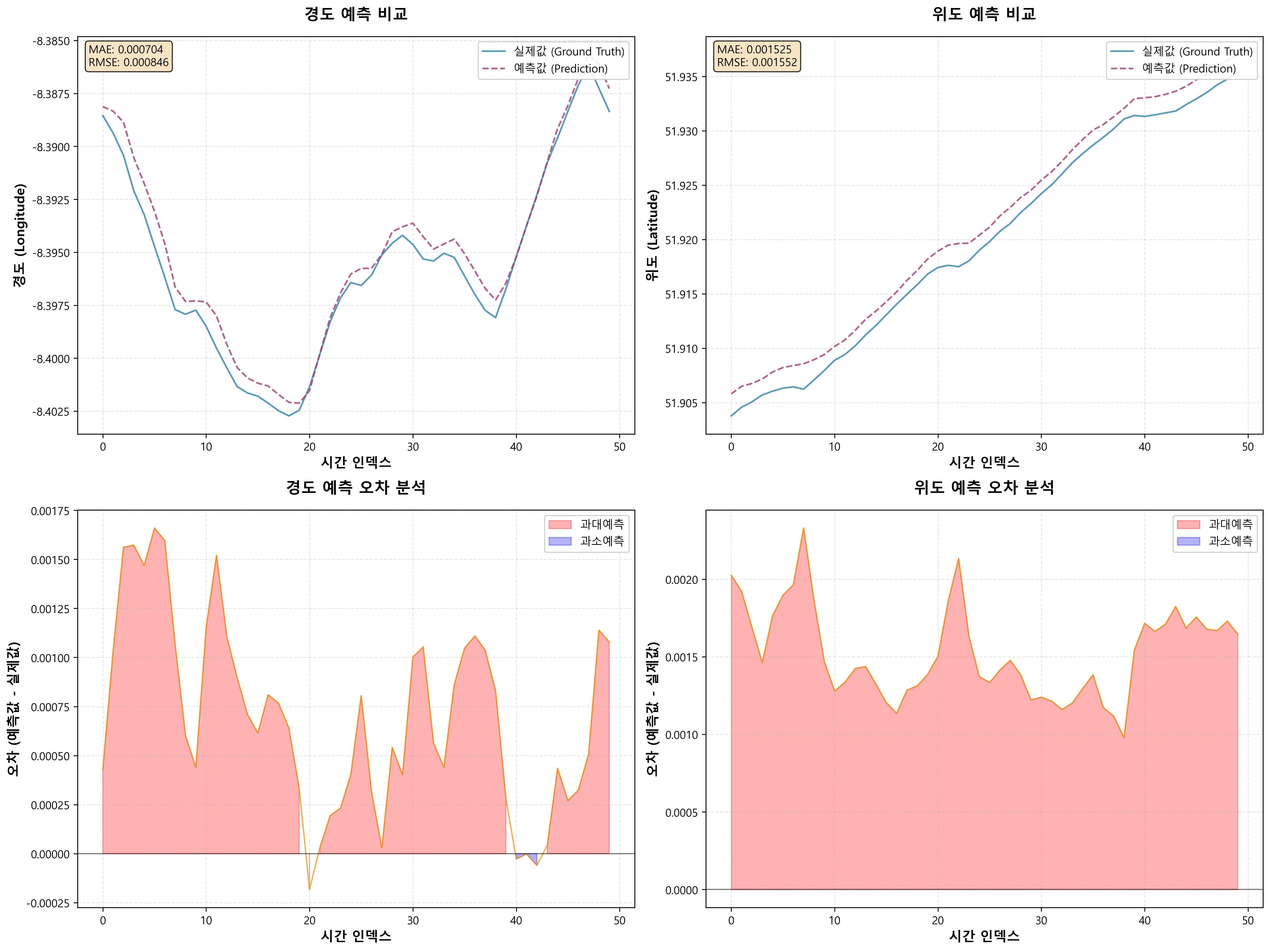

| 모델 | 평균 MAE | 평균 RMSE |
| Seen-LSTM | (0.001305 + 0.000429)/2 = 0.000867 | (0.001496 + 0.000485)/2 = 0.000991 |
| LLM | (0.000667 + 0.000317)/2 = 0.000492 | (0.000853 + 0.000436)/2 = 0.000645 |
| Unseen-LSTM | (0.000704 + 0.001525)/2 = 0.001115 | (0.000846 + 0.001552)/2 = 0.001199 |
'딥러닝 모델 > LSTM for Traffic Prediction' 카테고리의 다른 글
| RSRP 예측 Task에 대한 LSTM과 LLM의 비교 (0) | 2025.10.28 |
|---|---|
| 실제 RSRP 예측을 위한 Feature Selection (0) | 2025.10.27 |
| LSTM 학습과 관련된 몇 가지 Technique (0) | 2025.10.27 |
| Downlink Throughput 예측 Task에 대한 LSTM과 LLM의 비교 (0) | 2025.10.27 |
| LSTM 모델로 실제 Downlink Throughput 예측하기 (0) | 2025.10.24 |